Above a certain size, synchronous motors are not self-starting motors. This property is due to the inertia of the rotor; it cannot instantly follow the rotation of the magnetic field of the stator.
What is difference between synchronous and asynchronous motor?
Synchronous motor is a machine whose rotor speed and the speed of the stator magnetic field is equal. Asynchronous motor is a machine whose rotor rotates at the speed less than the synchronous speed. Asynchronous motor does not require any additional starting source.
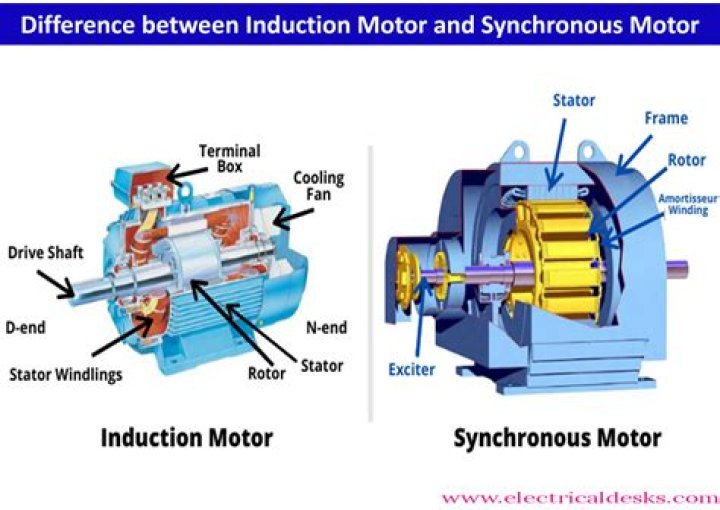
What is the difference between synchronous and induction motor?
The fundamental difference between these two motors is that the speed of the rotor relative to the speed of the stator is equal for synchronous motors, while the rotor speed in induction motors is less than its synchronous speed. Synchronous motors include two electrical inputs, making them doubly excited machines.
What is the advantage of synchronous motor?
The advantages of the synchronous motor are the ease with which the power factor can be controlled and the constant rotational speed of the machine, irrespective of the applied load. Synchronous motors, however, are generally more expensive and a d.c. supply is a necessary feature of the rotor excitation.
What is slip and synchronous speed?
Slip is the difference between the synchronous speed of a motor and its actual speed. Mathematically it is determined by. Slip = Synchronous Speed − Actual Speed. Using the example above for synchronous speed of a motor with four poles operating at 60 hertz, the value was calculated to be 1800 RPM.
What is a a synchronous system?
A synchronous system is one in which transfer of information between combinational blocks is performed in synchrony with a global clock signal. From: DSP Integrated Circuits, 1999
How do you communicate between two asynchronous systems?
Communication between two asynchronous systems is subject to a communication protocol, as illustrated in Figure 10.24. Four-phase signaling is one such protocol that will be discussed later. Figure 10.24. Communication between two asynchronous ststems
What is a self-timed circuit?
Self-timed circuits are a means of synchronizing different blocks at a local level, thereby alleviating problems associated with distributing global clock signals over the entire face of the chip.
What are the assumptions of the timed asynchronous model?
The timed asynchronous model is built on the following assumptions: Each processing node has a hardware clock with bounded, known, drift; high-integrity applications can use duplicated local clocks to achieve the required reliability for this device.