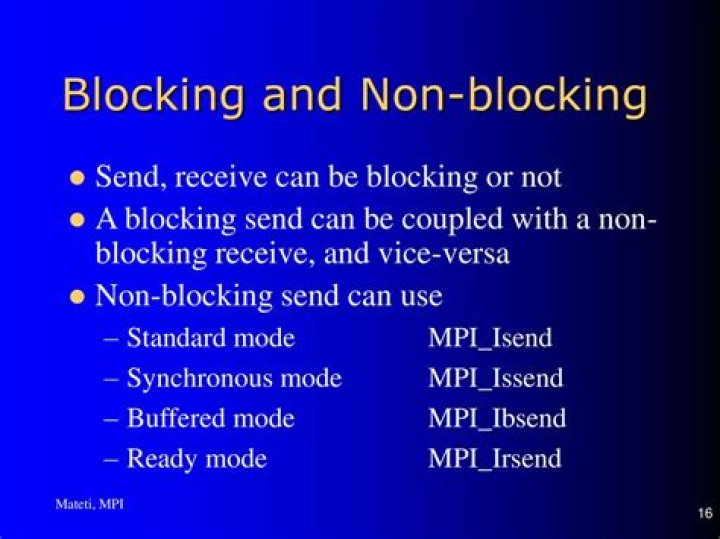
A nonblocking send start call initiates the send operation, but does not complete it. The send start call will return before the message was copied out of the send buffer. A separate send complete call is needed to complete the communication, i.e., to verify that the data has been copied out of the send buffer.
Is MPI receive blocking?
MPI provides a variety of send and receive calls in its interface. The call with the simplest name, MPI_Send(), does blocking communication. In other words, the function call does not return control to your program until the data you are sending have been copied out of your buffer.
What is blocking and non-blocking in MPI?
Blocking: return only when the buffer is ready to be reused. Non-blocking: return immediately. Buffering: data is kept until it is received. Synchronization: when a send is completed. Collective communications in MPI are always blocking.
What are the MPI functions for non-blocking communication?
MPI provide the functions MPI_WAIT and MPI_TEST are used to complete a nonblocking communication. The completion of a send operation indicates that the sender is now free to update the locations in the send buffer (the send operation itself leaves the content of the send buffer unchanged).
What is MPI blocking?
For MPI_Recv, blocking means that receive returns only after it contains the data in its buffer. This implies that receive can complete only after a matching send has started but doesn’t imply whether or not it can complete before the matching send completes.
What is the difference between a blocking receive and a non blocking receive?
Blocking returns after completing some operation, while non-blocking returns immediately and the user has to check when the operation has completed. The main point here is, the data buffer associated with the operation is unsafe to use on non-blocking calls when they return but safe to use on blocking calls.
What is MPI deadlock?
Deadlock or race conditions occur when the message passing cannot be completed. The MPI_Send commands will never be completed and the program will deadlock.
What is the difference between a blocking receive and a non-blocking receive?
What is blocking receive?
Which is the blocking receive in MPI?
The MPI standard requires that a blocking send call blocks (and hence NOT return to the call) until the send buffer is safe to be reused. Similarly, the Standard requires that a blocking receive call blocks until the receive buffer actually contains the intended message.
Is MPI send synchronous?
The MPI_Send() and MPI_Recv() are synchronous communication primitives : MPI_Send will not return until the destination processor has received the message.
Is MPI send asynchronous?
The MPI_Send() and MPI_Recv() are synchronous communication primitives : MPI_Send will not return until the destination processor has received the message. MPI_Recv will not return a message has been received.
What are non-blocking communications in MPI?
This way of sending messages is possible in MPI and called non-blocking communications. What is happening in MPI is a bit different. Non-blocking communications always require to be initialised and completed. What that means is that now, we will call a send and a receive commands to initialise the communication.
What is the difference between MPI_Isend() and MPI-irecv()?
Similarly, MPI_Recv()returns when the receive buffer has been filled with valid data. In contrast, non-blocking communication is done using MPI_Isend()and MPI_Irecv(). These function return immediately (i.e., they do not block) even if the communication is not finished yet.
What is the difference between send and receive mode in MPI?
Unlike in send, receive has only one modeand can be blockingor non-blocking. Before proceeding further, one must also be clear that I explicitly mention which one is MPI_Send\\Recv bufferand which one is system buffer( which is a local buffer in each processor owned by the MPI Library used to move data around among ranks of a communication group)
What is non-blocking communication?
Non-blocking communications. For the moment, we have only seen blocking point-to-point communication. That means that when a process sends or receive information, it has to wait (Animation from Cornell virtual workshop) for the transmission to end to get back to what it was doing. In some applications, this can be terribly limiting.